
Satellite for Optimal Control and Imaging
Mission Objectives
A techonology demonstration, SOC-i will carry an advanced guidance, navigation and control (GNC) payload capable of reorienting the spacecraft while satisfying multiple pointing constraints. Alongside a standard GNC system, this payload will provide accurate pointing for an onboard Earth imaging camera.
The mission will operate in space for 6 months, and will be supported by a UW ground station being developed in the Aerospace Engineering Research Building. It is a stated goal of the mission to be completely open-source, and we maintain code on our team's GitHub page .
Communications and Listening for SOC-i
The SOC-i CubeSat uses a Pacific Crest XDL Micro Transceiver for communications from the satellite to the ground. SOC-i transmits a 0.5 W beacon every 60 seconds worldwide that contains health and status data on the satellite. Telemetry and science data are downlinked when the satellite is overhead of our ground station at the University of Washington. Using a simple receiver setup, anyone can listen for the beacon and downlink when SOC-i is overhead. Following the link below, you can learn more about how to listen for SOC-i’s transmission and use the open-source software that we’ve developed to unpackage the data from our CubeSat!
Structures Thermal and Configuration
Design and Manufacturing
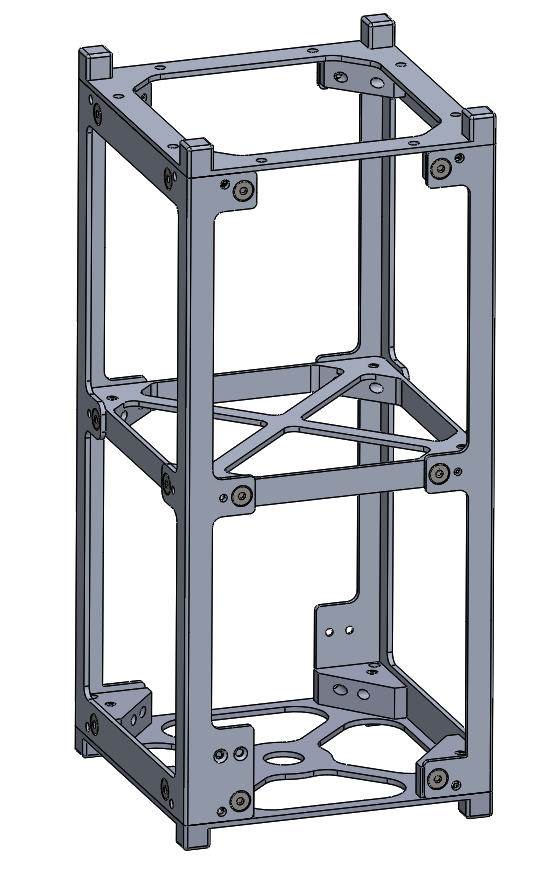
Using in-house 3D printing, we have gone through several iterations to produce the current design for SOC-i. Manufacturing is well underway, and several components have been machined already. The STC team has put together the render you see here, how cool! Next up, testing.

Guidance Navigation and Control
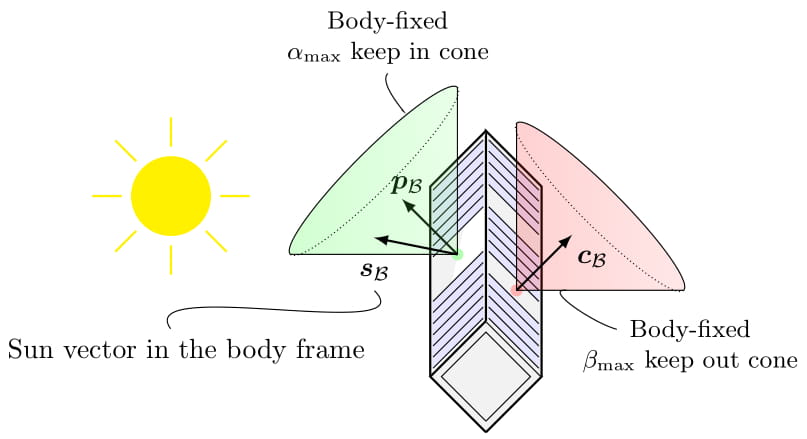
The experimental GNC system is capable of reorienting the spacecraft while guaranteeing hard pointing constraints and minimizing the power drawn by our set of four reaction wheels. In the figure below, the green cone represents a navigation sensor's field of view, while the red cone represents the camera's field of view. Reorientation maneuvers must be executed such that (i) the sun vector remains inside the green cone, (ii) the sun vector simultaneously remains outside the red cone and (iii) actuator and slew-rate limits are not violated. The satellite must compute these solutions on-board without any pre-loaded solutions or ground intervention.
Optimal Control and Convex Optimization
Our GNC payload combines optimal control theory and convex optimization to compute the reaction wheel commands that satisfy all desired constraints. The payload leverages previous work done at the UW in this area. In particular, we adapt methods from (Kim et al, 2010) and (Lee and Mesbahi, 2013) to formulate the problem. Solutions are obtained in real-time using the ECOS solver running on the main flight computer. Our implementation is an on-going process, but will use elements of optimal control theory or Successive Convexification .
GNC Hardware
To orient the SOC-i spacecraft, the GNC system uses the 4RW0 reaction wheels from NanoAvionics as the primary actuators for the attitude control system. Five magnetorquers complement these wheels, and are built in to the solar panels on each face except on the bottom, where the camera is located. For attitude estimation, the GNC system uses a single digital sun sensor custom-built into our solar panels, three 3-axis magnetometers, and three 3-axis gyroscopes.
Software
See the open source GNC code based in Matlab/Simulink.
Publications
See our publications to read more on this topic.
Imaging System
